汽车智能化是这几年中国乘用车市场的核心,各种智能配置如主动刹车、环视系统、车道偏离预警/辅助等,在国内市场的装配率都慢慢开始起来,此外如疲劳提示和交通标志识别等基于视觉的系统还在飞速提升。但是在2019年中国乘用车市场搭载自动泊车入位功能的车型中——这项听上去是新司机神器的辅助功能还是比较少的,整车企业在这一项的努力并没有其他的ADAS辅助功能来得显眼。这是为什么呢?
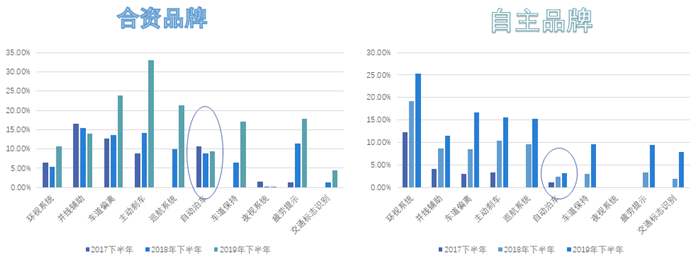
图1 智能泊车在车辆智能化的过程中发展相对比较慢
1)自动泊车的分类
首先我们来说一说自动泊车的分类,实际上“自动泊车入位”的功能,在国外很早就有了,基本是豪华车型的专属配置,普通消费者接触比较少。随着技术革新,自动泊车技术普及化,使得这项功能慢慢为大家所了解,但是在这方面由于成本与技术的原因,在不同车型搭载自动泊车功能实际表现有很大的差别。按照智能化程度来分的话,可以分为三种,半自动泊车、自动泊车入位和全自动泊车——
●半自动泊车(车企在产品配置单上也会宣传为自动泊车):这项功能,进入停车场后开启自动泊车功能,位于车身四周的超声波雷达会监测停车场的空位,如果发现合适的车位,会发出声音提示车主停车,按指示来进行踩刹车、切换挡位。这类泊车系统包含规划泊车路径,操控转向系统等功能,其余都需要驾驶员配合。
●自动泊车:一般系统找到车位,提示车主输入自动泊车命令,然后挂入倒车挡以后,整个泊车过程中,方向盘、刹车、挡位的切换都交由系统自主完成,不用车主辅助操作。为了判断车主在车内,往往需要按住一个按键就行,如遇到突发情况,松开按键就能及时终止自动泊车的动作。一般泊车系统支持三种情况的泊车,即平行泊入、平行泊出和垂直泊入。
●全自动泊车:在泊车系统识别到停车位后,整个泊车过程是不需要人为介入的,全部交由系统来完成,便利性是最好的。这种泊车一般要求消费者在车附近,如果遇到意外情况,可以遥控停止。
2)目前自动泊车渗透率不高的深层原因(消费者意愿)分析
这首先还是涉及到消费者感知,目前泊车入位是有法规限制的,驾驶员还需坐在车里,对于泊车过程用户满意度不高。消费者日常的泊车场景:小区停车、单位停车、其他地方停车,按照理论的过程,全自动泊车只要能识别出的车位,屏幕上就有一个大P,按上去就能自动泊车。这里的问题主要有以下的几个:
1)车位识别的限制:这里的车位识别,是通过超声波和视觉为主,限定条件往往需要两侧有车的车位,往往不能根据划线停车入位。而且由于泊车的设计因素,内部系统对车位的大小和形状有一定的要求,停车位尺寸过小或者太大,会使系统在第一个环节——识别停车位时就失败。
2)泊车的时间:这涉及到系统安全的原因,整个过程比较慢,在车位比较小的条件下,会根据距离中断然后继续尝试,这就使得在比较极限的条件下,识别到车位入库的时间比车主自己操作要久不少。
3)停车的效果:也正是这个原因,自动泊车往往在平行泊车场景下水平不怎么样,我们实际的要求是能够贴上路牙子,但是对于自动泊车系统计算过程考核标准不同,对停车效果要求高(在小区里面怕刮擦碰)的车主往往需要二次停车。
因此,大部分车主对于自动泊车速度和泊车使用兼容性是有抱怨的,能用的场景不是特别多。对新手司机或者停车有困难的司机有一定帮助,对于其他司机能自己来的,基本没太大帮助。

图2 泊车的场景
这里的核心问题,还是在中国本身就有停车比较难的问题,车主在小区、在单位往往都是需要早来早抢的,随着车位资源的紧缺,中国市场停车的需求就是比较极限的。因此和国外不同,提高泊车的使用率特性,需要非常的智能化才能有效果,需要使用多个传感器感知融合,根据超声波传感器和视觉辅助检测车位,在高算力的域控制器上实现自动泊车的功能,整个处理的速度需要不断的提高。
3)中国市场车企推动的自动泊车方案
我们首先还是看一下国内外的产品情况:
国内第二类自动泊车系统目前在市场上比较常见,比如吉利星越、长安CS75 PLUS、上汽荣威MARVEL X、广汽传祺、威马 EX5等车型都配置了。而像特斯拉,则以“智能召唤”功能实现自动泊车——该功能可以自动控制车辆行驶到车主所在的位置,或者到达指定的位置,并且可以按照道路实际情况躲避障碍物和停车的功能;“反向召唤”(Reverse Summon)是特斯拉“智能召唤”的增强版,车主在停车场入口处下车,车辆或可自己寻找车位并完成停车。设定车辆和车主间最大距离不得超过65米,召唤车速不高于 8 km/h。
和特斯拉相似的功能设计上,国内的小鹏汽车在这条路上走的最远,对于小鹏汽车来说,智能泊车是个入口,就是要让用户改变车辆智能化的体验。对于小鹏的P7,整个系统包括座舱系统、网联通讯系统、各项ADAS功能等系统设计是个挑战,这涉及到整车E/E架构的改变、超强算力处理器和域控制器的采用、整车OTA及信息安全(和功能安全)的导入等等。
在小鹏G3上,智能泊车的设计就瞄准“多场景全自动泊车”系统。首先在硬件上,G3的XPILOT2.5智能驾驶系统装备了多达20个传感器,其中包括12个超声波雷达、5个高清摄像头和3个毫米波雷达。自动泊车功能会用到超声波雷达、左右外后视镜的摄像头以及车尾后视摄像头进行车位识别。 在车位识别上,能识别地面标线,仅靠地面标线也能完成自动泊车,并且对于车位的大小要求也是根据算力的要求逐步减少。
总结:
我们可以看到基于中国本土化的智能泊车需求有几点:一,多场景识别智能泊车位;二,记录车主泊车的场景和位置以不断优化;三,优化泊车速度和时间;四,可以通过数据共享不断自我学习。对于这个领域要切入去做,需要用到大量的智能化和网络技术,也需要车企建立网络后台给单车支持,这个细分场景如果能做好,对于消费者的满意度可以达到一个很高的位置。中国车企解决本土的需求,一方面要迎着困难上,另外一方面也需要根据手里的开发资源在差异化的地方下大力气,我觉得适合中国本土的自动泊车其实是一个很好的切入点。













-
Sennheiser在印度推出新的蓝牙耳机 价格 为 4,990印度卢比

2020-03-03 20:34:30
-
医疗保健分析公司Tricog从日本 美国投资者筹集了1050万美元

2020-03-03 20:33:21
-
云数据分析初创公司Spire Global融资4000万美元

2019-09-30 09:50:29
-
这款由MINI支持的启动加速器正在使用技术来应对气候变化

2019-09-30 09:49:44
-
生物技术初创公司Ribometrix筹集了780万美元的资金用于开发直接针对RNA的小分子药物以治疗人类疾病
2019-09-30 09:49:00
- 在初步报告显示上半年减值费用超过12亿美元后 卡夫亨氏股价下跌14%
- Cord商标即将在即将举行的全球拍卖行劳动节周末拍卖会上亮相
- Venture Catalysts为早期初创公司推出300卢比的基金
- 我需要35000美元才能获得惊喜 我应该买什么车
- 房地产业陷入了税务负担
- 谷歌的Pixel 4 Specs泄漏并建议一些狂野的东西正在发生在相机上
- 从9月1日开始 现金提取2%TDS超过1卢比
- 父女溺水 父亲奋力举起女儿不幸遇难
- 维珍澳大利亚超级跑车锦标赛揭示了2020年赛程的新格式
- Mike Ashley赢得了Jack Wills的竞选
- 商店忠诚卡提供了我们数据的价值洞察力
- 2020 SUBARU LEGACY将凯美瑞全部归于我们
- 房地产贷款平台Groundfloor通过众筹筹集了300万美元
- 本周美国企业信贷市场应该关注什么
- 腾讯将收购环球音乐10%的股份
- 梅西百货的收益 周三市场知道什么
- 买恐龙化石有什么问题吗
- CONCOURS D'LEMONS就像柠檬汁一样刮得干脆
- Allbirds以其羊毛运动鞋而闻名 正在进入服装行业
- 这20辆车是美国最被盗的新车