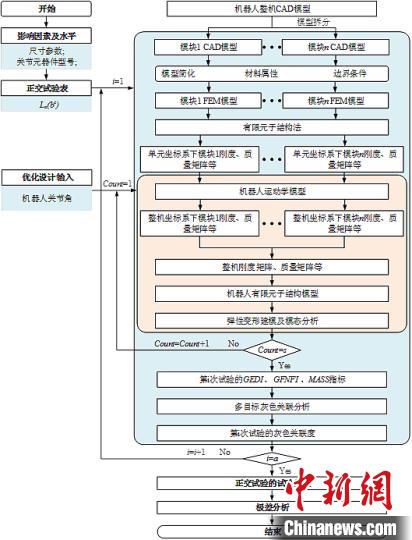
协作机器人多目标优化设计流程。中国科学院沈阳自动化研究所供图
中新网沈阳7月29日电 (王景巍)中国科学院沈阳自动化研究所29日发布消息称,该所协作机器人研究团队提出了一种基于有限元子结构法和正交设计的协作机器人全域多目标优化设计方法,该方法解决了协作机器人结构优化中存在的位姿及非结构参数影响、多目标耦合、计算速度与精度平衡等问题,具有建模精度高、计算速度快、对各模块的复杂形状适应性好等特点,能够有效提高协作机器人的刚度及动态性能。
近年来,协作机器人研究团队在中国科学院重点部署项目、中国国家发展和改革委员会新一代信息基础设施建设工程和“互联网+”重大工程项目等资助下,系统地开展了协作机器人机构和结构的优化设计方法研究,取得了一系列高水平的研究成果。
在安全、轻质、大负载自重比的约束下要求机器人具有的较高的刚度与动态性能是协作机器人设计中面临的挑战,结构优化设计为解决这一问题提供了有效的途径。在该项研究中,研究人员采用全域弹性变形和一阶固有频率指标评价机器人的整机刚度和动态性能,进而提出了一种协作机器人全域多目标优化设计方法。
首先,通过建立机器人有限元子结构模型实时高效地获得机器人的多种全局性能指标,该建模方法能够在保证计算效率的同时保留有限元法的建模精度;其次,通过灰色关联分析法构建多目标优化函数,从多个单目标有效解中提取多目标的最有效解;然后,构建正交设计试验,求解在不同影响因素水平下的灰色关联度,在不减少优化参数的同时降低计算量;最后,通过极差分析获得最优影响因素水平组合,用于指导协作机器人的结构优化设计。
基于上述方法,研究人员对所开发的SHIR5协作机器人进行了优化设计,结构优化后,机器人自重不变,刚度与动态性能得到了明显的提升,验证了本方法的正确性与有效性。此外,相关成果发表于优化设计领域国际著名期刊《StructuralandMultidisciplinaryOptimization》。(完)
相关推荐






猜您喜欢
- 服贸会明日开幕!200余种机器人将在专题展上亮相
- 重访抗美援朝纪念馆和沈阳抗美援朝烈士陵园
- 收官红八月:润和软件携手华为昇腾共同发布新一代智能机器人解决方案
- 脑机接口新进展:马斯克直播“遛猪”
- 楼继伟称财政政策已极度宽松,实际政策落地进展如何?
- 新型致动器研发促微型四脚机器人大军创造
- 涉案员工疑似自焚 大众窃听案新进展
- 天智航新增专利22项,骨科机器人入选Nature何时扭亏为盈?
- AD治疗药物新进展:比尔盖兹与阿兹海默症协会资助推进临床
- 住建部廖玉平:打造“中国建造”升级版建筑机器人应用前景广阔
- 罗辑思维上市最新进展:从科创板变更为创业板
- 国产PD-1适应症“追逐”,恒瑞卡瑞利珠单抗临床获新进展
- 政协沈阳市和平区委原副主席周以胜接受审查调查
- 西藏山南引进机器人磁控胶囊技术 患者不再“谈镜色变”
- 1亿美元买地 特斯拉超级工厂有新进展


-
台风“海神”逐步北上 后期或将影响东北

2020-09-03 18:44:26
-
最新数据持续向好引海外点赞中国经济复苏

2020-09-03 18:43:15
-
我国成为3月份以来全球主要服务贸易国中唯一出口增长国家

2020-09-03 18:41:14
-
中国改革低保等现行社会救助制度 打造多层次分类救助体系
2020-09-03 18:28:53
-
2020年服贸会9月4日开幕 设置7类活动
2020-09-03 18:28:22