印度理工学院马德拉斯(IIT-Madras)研究人员开发出一种多模式机器人系统,具有良好的抓取,操纵和运动能力,可用于工业和野外应用。该系统被称为“GraspMan”,它包含一对抓取器,能够牢固地抓住物体,并像人手一样操纵物体。
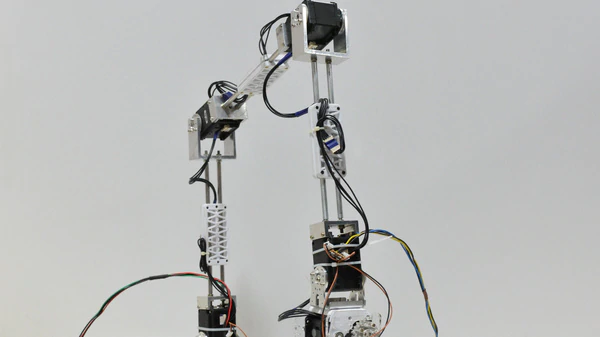
IIT-Madras在周三的一份声明中称,IIT Madras的工程设计部机器人实验室制造了一个抓取器的原型,实验结果证实了机器人的操纵能力。两个这样的抓紧器配备有机器人平台,提供行为适应,这是改变运动行为以适应环境的能力。
该项研究由IIT马德拉斯工程设计系机器人实验室的Asokan Thondiyath教授和他的学生以及研究学者Nagamanikandan Govindan先生领导。他们最近的发展已发表在ASME着名的同行评审的机械和机器人杂志上。
根据Thondiyath教授的说法,“这项研究背后的动机是实现一种具有简约设计的机器人,可以克服任务专用机器人的需求,这些机器人能够在不增加系统复杂性的情况下在不同环境中导航和操纵。”
据该研究所称,由IIT Madras团队开发的这种新型机器人具有各种工业应用,例如管道攀爬和检查,其中涉及攀爬,保持和组装,所有这些都可以在他们的设计中实现。用于搜索和救援操作以及机车应用的机器也将受益于该机器人平台。
由Asokan Thondiyath教授及其研究学者Nagamanikandan Govindan先生开发的机器人平台采用多功能抓取器,旨在执行复杂的操作和移动任务,无需专用的电机进行操作,移动和抓握。
机器人手必须具有人手的能力或能够模仿常见的手部姿势,以便实现对物体的稳定抓握和灵巧的手持操纵。机器人抓取器,相当于人手的机器,必须能够处理各种形状的物体,调整与物体接触点的力,并在手中滑动/旋转物体,设计的复杂性。
Govindan强调了他们研究的独特点,他说:“我们最近的出版物提供了有关制造原型的运动学和静态分析和实验的详细信息,以验证不同的操作模式。运动和操纵的结合为机器人提供了有趣的特征,例如,嘎嘎声(抱着物体和行走),非拟人行走和肱臂(像狒狒一样摆动手臂)。“















-
云数据分析初创公司Spire Global融资4000万美元

2019-09-30 09:50:29
-
这款由MINI支持的启动加速器正在使用技术来应对气候变化

2019-09-30 09:49:44
-
生物技术初创公司Ribometrix筹集了780万美元的资金用于开发直接针对RNA的小分子药物以治疗人类疾病
2019-09-30 09:49:00
-
Xpeng P7成为首款为驾驶员实施阿里巴巴Mini App技术的智能汽车

2019-09-30 09:48:25
-
中国推出具有AI的新型500百万像素超级相机 能够识别成千上万人群的每张脸

2019-09-30 09:47:52
- 喝醉了吗 不能这个呼吸分析仪考勤系统
- 我需要35000美元才能获得惊喜 我应该买什么车
- 2020沃尔沃 XC90 T8 ESSENTIALS 对无失效SUV进行微妙改进
- 范县:雪亮工程将不断增强人民获得感 幸福感和满意度
- 贝德福德学校错误计算老师的假期工资
- 由于NJOY用美元电子香烟打败客户 Juul的势头下滑
- NASA同意与SpaceX合作开发轨道加油技术
- 谷歌的Pixel 4 Specs泄漏并建议一些狂野的东西正在发生在相机上
- IBM Tata Communications加入美国科技平台的管理委员会
- NBA是中国最受欢迎的体育联盟 电子竞技可能是增长的关键
- 移动房屋公园的商业模式暴露了科罗拉多租户的经济脆弱性 他们无处可去
- 当用户关注主题时 Twitter推出了一项新功能 以删除不相关的内容
- 波特兰无线创业公司Rigado向瑞士公司出售蓝牙技术
- 2019年上半年 希腊房地产的外国投资猛增
- Cramer Remix将为您的投资组合带来收入的游乐园股票
- 商店忠诚卡提供了我们数据的价值洞察力
- 买恐龙化石有什么问题吗
- OnePlus电视现已正式推出 预计很快推出
- 房屋保障建议如何使住房成为一项权利
- 汇率:为什么英镑变弱 本周英镑兑美元兑美元跌至两年来的低点